



About Canary
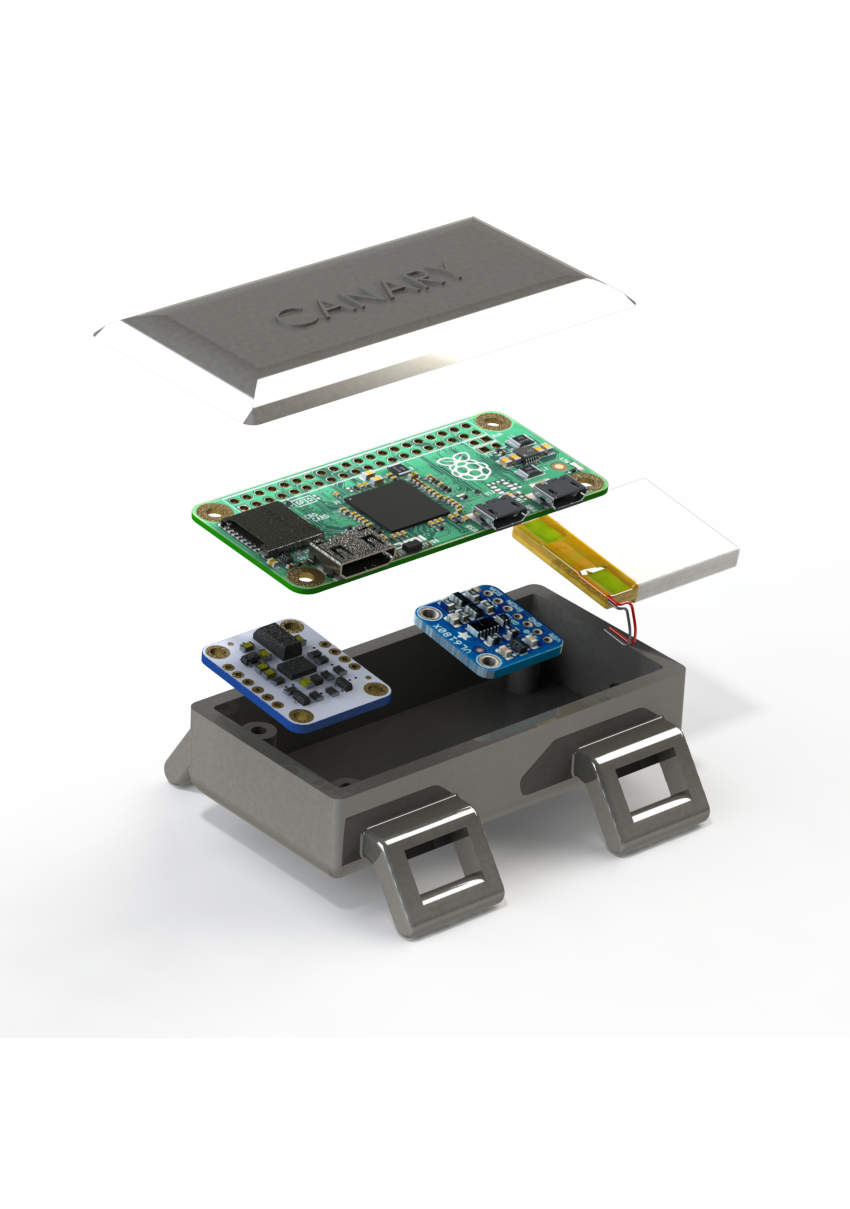
The purpose of the system is to design a low power wearable device that converts real-time sensory data to instrumental music for musical therapy sessions for the patients of dementia.
The wearable device will send accelerometer (ADXL335) and barometer (MPL3115A2) data to the sonification module which is then visualized to a soothing music relating to motion state of the patient and play it using a Bluetooth speaker. Furthermore, this data is sent to Plotly for graphical visualizing of the patient’s motion state.
There is a user interface where the user will be able to control volume of the sound and manage the sonification device. In addition, a care giver can monitor the motion state of the patient through real time plot of movement data of the patient from accelerometer sensor.

Hardware Configuration
The Components
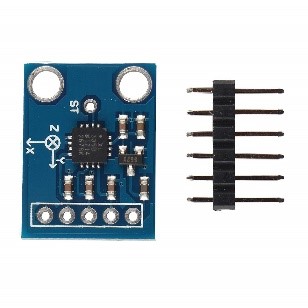
ADXL335 Accelerometer

Raspberry pi 3
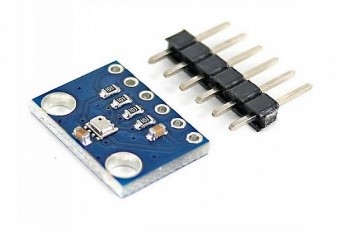
Barometer (MPL3115A2)

Battery
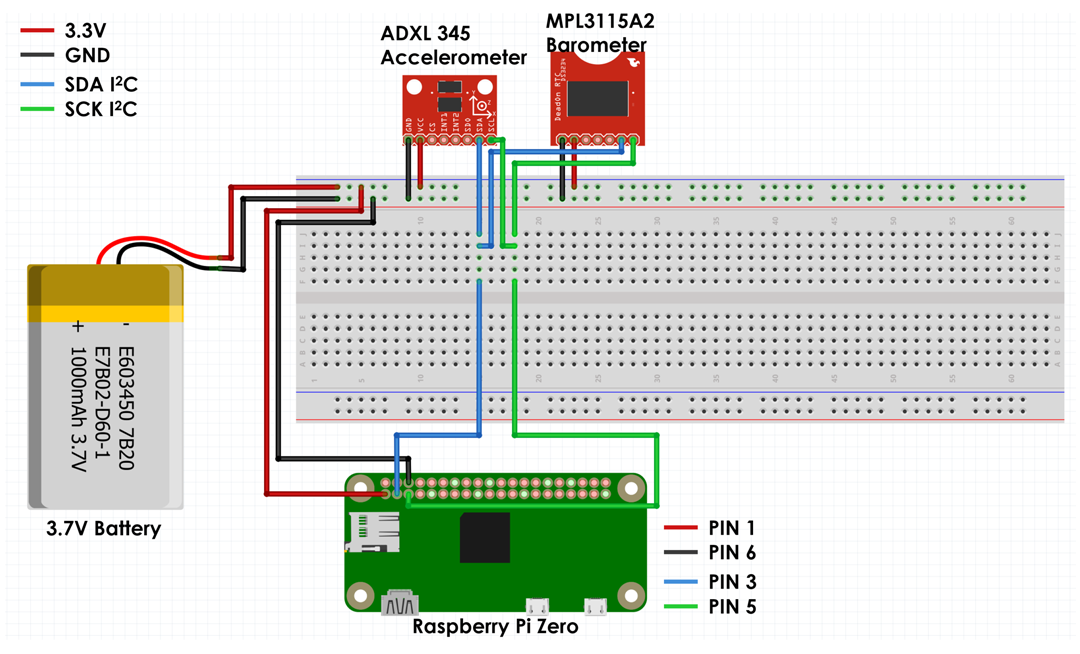
Schematic diagram
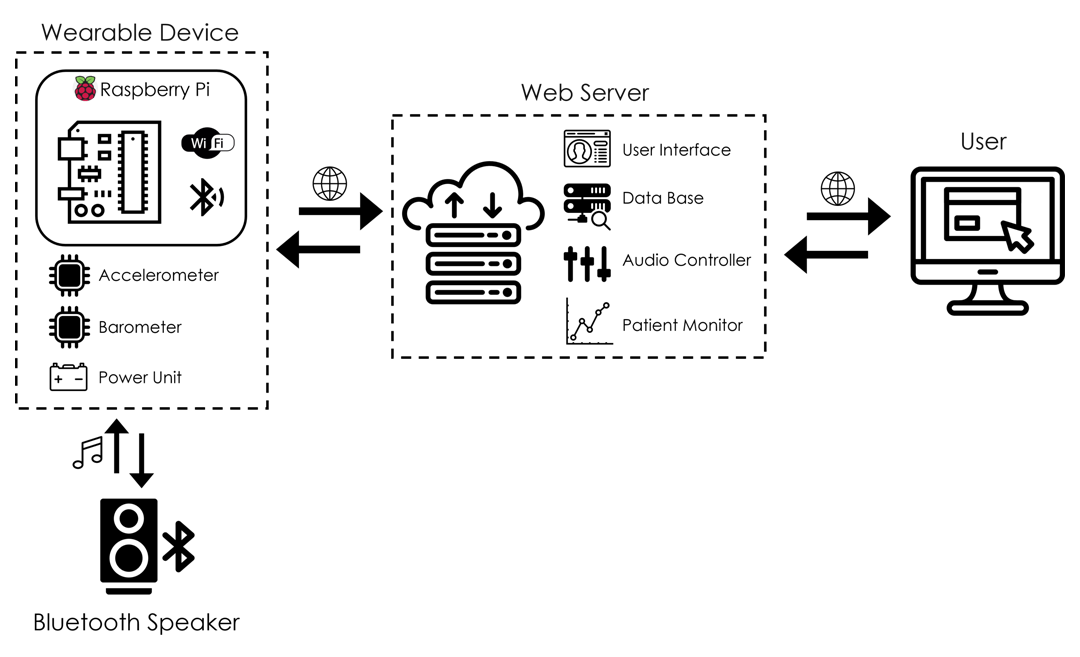
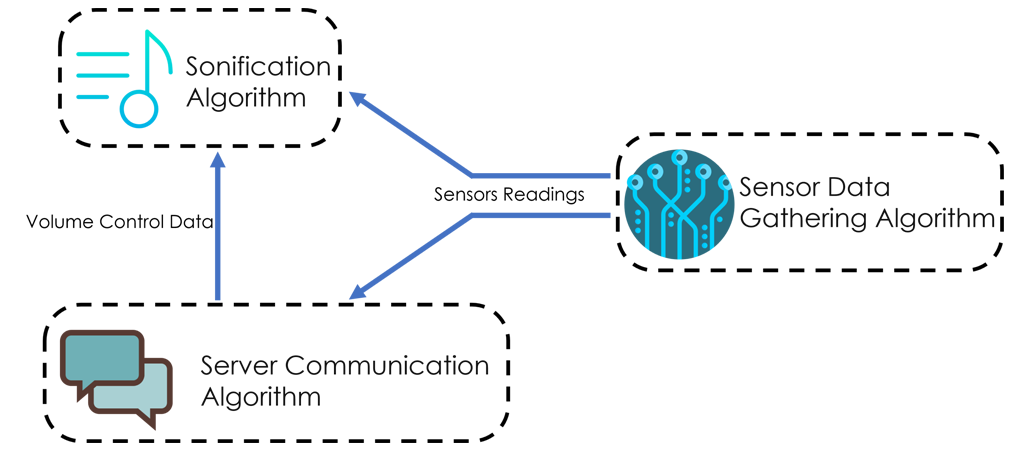
System Architecture
The project has two main sections. One is wearable device, which is packed with sensors, raspberry pi zero and the rechargeable power unit, and another is the web application which will allow user to remotely control the sensors, the audio, and log data. The remote connection is established via internet by connecting the raspberry pi to the server. The web app will be configured to connect to the server and control the Raspberry Pi remotely will be possible.
Software Configuration
Cloud Platform used
Algorithm architecture
Device-End Code
Canary App
Cloud platforms used
Cloud VPS (KVM)
The Cloud Platform is a cloud computing solution based on KVM, Linux’s Kernel-based Virtual Machine. It offers scalable, virtualized resources as a service, purchased on a utility basis. We used it to design our customized near-instant access to the cloud platform.
Plot.ly
Plotly is technical computing company headquartered in montreal, Quebec, that develops online data analytics and visualization tools. Plotly provides online graphing, analytics, and statistics tools for individuals and collaboration, as well as scientific graphing libraries for python, R, MATLAB, Perl, Julia, Arduino and Rest.
Dataplicity
Dataplicity is a service that aims to simplify the process of connecting to devices over the internet. The concept behind Dataplicity is to simplify the process of making a Raspberry Pi available over the internet. Dataplicity uses an opportunistically connected, client- initiated, secure HTTPS connection to the Dataplicity IOT Router. It works on satellite, cellular and fixed networks, even if the device cannot be pinged directly – all it needs is a functioning internet connection.

Algorithm Architecture
Code
import time
import board
import busio
import adafruit_adxl34x
import numpy
import smbus
import datetime
import sonify
import plotly.plotly as py# plotly library
from plotly.graph_objs import Scatter, Layout, Figure # plotly graph objects
import json
import requests
import os
def main():
username = ‘messay’
api_key = ‘aGWxBNUA1wgFnC8xkY66’
stream_token = ‘8g0wx06s37′
py.sign_in(username, api_key)
trace1 = Scatter(
x=[],
y=[],
stream=dict(
token=stream_token,
maxpoints=200
)
)
layout = Layout(
title=’Canary Patient Motion Monitor’
)
fig = Figure(data=[trace1], layout=layout)
print (py.plot(fig, filename=’Canary Patient Motion Monitor Values’))
stream = py.Stream(stream_token)
stream.open()
Sonifier=sonify.Sonifier(audioDeviceId=2)
i2c = busio.I2C(board.SCL, board.SDA)
bus = smbus.SMBus(1)
control_url=”https://canaryplay.isensetune.com/app/param.json”
accelerometer = adafruit_adxl34x.ADXL345(i2c)
while True:
r=requests.get(control_url)
d=json.loads(r.content)
bus.write_byte_data(0x60, 0x26, 0x39)
time.sleep(1)
data = bus.read_i2c_block_data(0x60, 0x00, 4)
# Convert the data to 20-bits
pres = ((data[1] * 65536) + (data[2] * 256) + (data[3] & 0xF0)) / 16
pressure = (pres / 4.0) / 1000.0
#print (“Pressure : %.2f kPa” %pressure)
time.sleep(0.2)
a=accelerometer.acceleration
b=numpy.sqrt(numpy.square(a[0])+numpy.square(a[1])+numpy.square(a[2]))
#print(“Acceleration : %f” %b)
key,baroSd=Sonifier.mapDataToMidiRange(b,pressure)
stream.write({‘x’: datetime.datetime.now(), ‘y’: b})
Sonifier.playAudio(key,int(d[‘volume’]),baroSd+int(d[‘pitch’]),d[‘instrument’])
if __name__==’__main__’:
main()
######################################
from scipy.interpolate import interp1d
import io
from time import sleep
import pygame.midi
import pygame
from constants import *
from sensors import *
import math
import time
import random
class RunningStats:
“””
Here is a literal pure Python translation of the Welford’s algorithm implementation from
http://www.johndcook.com/standard_deviation.html:
https://github.com/liyanage/python-modules/blob/master/running_stats.py
“””
def __init__(self):
self.n = 0
self.old_m = 0
self.new_m = 0
self.old_s = 0
self.new_s = 0
def clear(self):
self.n = 0
def push(self, x):
self.n += 1
if self.n == 1:
self.old_m = self.new_m = x
self.old_s = 0
else:
self.new_m = self.old_m + (x – self.old_m) / self.n
self.new_s = self.old_s + (x – self.old_m) * (x – self.new_m)
self.old_m = self.new_m
self.old_s = self.new_s
def mean(self):
return self.new_m if self.n else 0.0
def variance(self):
return self.new_s / (self.n – 1) if self.n > 1 else 0.0
def standard_deviation(self):
return math.sqrt(self.variance())
class Sonifier:
def __init__(self,sensors=[‘Accelerometer’],
instrument=’electric guitar (clean)’,
audioDeviceId=0,delay=0.7):
self.prevAcceleroVal=0
self.prevBaroVal=0
self.sensors=sensors
# self.n = 0
# self.old_m = 0
# self.new_m = 0
# self.old_s = 0
# self.new_s = 0
self.acceleroDeviator=RunningStats()
self.baroDeviator=RunningStats()
self.instrument = INSTRUMENTS[instrument]
self.volume=127
self.prevKey=0
self.audioDeviceID=audioDeviceId
self.delay=delay
self.pitch=0
self.player=”
def deletePlayer(self):
pygame.midi.init()
del self.player
pygame.midi.quit()
def changeInstrument(self,instrument):
pygame.midi.init()
self.instrument = INSTRUMENTS[instrument]
self.player.set_instrument(self.instrument)
pygame.midi.quit()
def changePitch(self,val):
pygame.midi.init()
self.player=pygame.midi.Output(self.audioDeviceID)
self.player.set_instrument(self.instrument)
self.player.pitch_bend(val)
del self.player
pygame.midi.quit()
def playAudio(self,key,volume,pitch,instrument):
pygame.midi.init()
print(pygame.midi.get_count())
self.player=pygame.midi.Output(self.audioDeviceID)
self.instrument=instrument
self.player.set_instrument(INSTRUMENTS[self.instrument])
self.player.pitch_bend(pitch,self.audioDeviceID)
self.player.note_on(key, volume)
self.delay=random.uniform(0.5,0.8)
time.sleep(self.delay)
self.player.note_off(key, volume)
del self.player
pygame.midi.quit()
def soothingSound(self,dataPoint):
if(self.prevAcceleroVal==0):
self.prevAcceleroVal=dataPoint
self.acceleroDeviator.push(dataPoint)
self.acceleroDeviator.mean()
sd=self.acceleroDeviator.standard_deviation()
if(dataPointself.prevAcceleroVal) and not (dataPoint+sd>ADXL345[‘2G’][1]):
dataPoint=dataPoint+sd
dataPoint = ADXL345[‘2G’][0] if dataPoint < ADXL345['2G'][0] else ADXL345['2G'][1] if dataPoint > ADXL345[‘2G’][1] else dataPoint
return dataPoint
def soothingPitch(self,dataPoint):
if(self.prevBaroVal==0):
self.prevBaroVal=dataPoint
self.baroDeviator.push(dataPoint)
self.baroDeviator.mean()
sd=self.baroDeviator.standard_deviation()
# if(dataPointself.prevBaroVal) and not (dataPoint+sd>BMP180[1]):
# dataPoint=dataPoint+sd
# dataPoint = BMP180[0] if dataPoint < BMP180[0] else BMP180[1] if dataPoint > BMP180[1] else dataPoint
#return dataPoint
return sd
def mapDataToMidiRange(self,accDataPoint,baroDataPoint):
“””
midi notes have a range of 0 – 127. Make sure the data is in that range
data: list of tuples of x, y coordinates for pitch and timing
min: min data value, defaults to 0
max: max data value, defaults to 127
return: data, but y normalized to the range specified by min and max
“””
accDataPoint=self.soothingSound(accDataPoint)
baroSd=int(self.soothingPitch(baroDataPoint))*10
m=interp1d([ADXL345[‘2G’][0],ADXL345[‘2G’][1]],[MIDI_RANGE_LOW,MIDI_RANGE_HIGH])
key=m(accDataPoint)
key=int(key)
if(self.acceleroDeviator.n==20):
self.acceleroDeviator.clear()
self.prevAcceleroVal=accDataPoint
return key,baroSd
############DATA FORMATTER##############
def clear(self):
self.n = 0
def push(self, x):
self.n += 1
if self.n == 1:
self.old_m = self.new_m = x
self.old_s = 0
else:
self.new_m = self.old_m + (x – self.old_m) / self.n
self.new_s = self.old_s + (x – self.old_m) * (x – self.new_m)
self.old_m = self.new_m
self.old_s = self.new_s
def mean(self):
return self.new_m if self.n else 0.0
def variance(self):
return self.new_s / (self.n – 1) if self.n > 1 else 0.0
def standard_deviation(self):
return math.sqrt(self.variance())
######################################
dataThreshold=100
NOTES = [
[‘C’], [‘C#’, ‘Db’], [‘D’], [‘D#’, ‘Eb’], [‘E’], [‘F’], [‘F#’, ‘Gb’],
[‘G’], [‘G#’, ‘Ab’], [‘A’], [‘A#’, ‘Bb’], [‘B’]
]
MIDI_RANGE_LOW=0
MIDI_RANGE_HIGH=127
def get_keys():
base_keys = {
‘c_major’: [‘C’, ‘D’, ‘E’, ‘F’, ‘G’, ‘A’, ‘B’],
‘d_major’: [‘D’, ‘E’, ‘F#’, ‘G’, ‘A’, ‘B’, ‘C#’],
‘e_major’: [‘E’, ‘F#’, ‘G#’, ‘A’, ‘B’, ‘C#’, ‘D#’],
‘f_major’: [‘F’, ‘G’, ‘A’, ‘Bb’, ‘C’, ‘D’, ‘E’, ‘F’],
‘g_major’: [‘G’, ‘A’, ‘B’, ‘C’, ‘D’, ‘E’, ‘F#’],
‘a_major’: [‘A’, ‘B’, ‘C#’, ‘D’, ‘E’, ‘F#’, ‘G#’, ‘A’],
‘b_major’: [‘B’, ‘C#’, ‘D#’, ‘E’, ‘F#’, ‘G#’, ‘A#’, ‘B’],
‘c_sharp_major’: [‘Db’, ‘Eb’, ‘F’, ‘Gb’, ‘Ab’, ‘Bb’, ‘C’, ‘Db’],
‘d_sharp_major’: [‘Eb’, ‘F’, ‘G’, ‘Ab’, ‘Bb’, ‘C’, ‘D’],
‘f_sharp_major’: [‘F#’, ‘G#’, ‘A#’, ‘B’, ‘C#’, ‘D#’, ‘F’, ‘F#’],
‘g_sharp_major’: [‘Ab’, ‘Bb’, ‘C’, ‘Db’, ‘Eb’, ‘F’, ‘G’, ‘Ab’],
‘a_sharp_major’: [‘Bb’, ‘C’, ‘D’, ‘Eb’, ‘F’, ‘G’, ‘A’, ‘Bb’]
}
base_keys[‘d_flat_major’] = base_keys[‘c_sharp_major’]
base_keys[‘e_flat_major’] = base_keys[‘d_sharp_major’]
base_keys[‘g_flat_major’] = base_keys[‘f_sharp_major’]
base_keys[‘a_flat_major’] = base_keys[‘g_sharp_major’]
base_keys[‘b_flat_major’] = base_keys[‘a_sharp_major’]
return base_keys
KEYS = get_keys()
# Instrument and Percussion map from
# https://www.midi.org/specifications/item/gm-level-1-sound-set
INSTRUMENTS = {
‘accordion’: 22,
‘acoustic bass’: 33,
‘acoustic grand piano’: 1,
‘acoustic guitar (nylon)’: 25,
‘acoustic guitar (steel)’: 26,
‘agogo’: 114,
‘alto sax’: 66,
‘applause’: 127,
‘bagpipe’: 110,
‘banjo’: 106,
‘baritone sax’: 68,
‘bassoon’: 71,
‘bird tweet’: 124,
‘blown bottle’: 77,
‘brass section’: 62,
‘breath noise’: 122,
‘bright acoustic piano’: 2,
‘celesta’: 9,
‘cello’: 43,
‘choir aahs’: 53,
‘church organ’: 20,
‘clarinet’: 72,
‘clavi’: 8,
‘contrabass’: 44,
‘distortion guitar’: 31,
‘drawbar organ’: 17,
‘dulcimer’: 16,
‘electric bass (finger)’: 34,
‘electric bass (pick)’: 35,
‘electric grand piano’: 3,
‘electric guitar (clean)’: 28,
‘electric guitar (jazz)’: 27,
‘electric guitar (muted)’: 29,
‘electric piano 1’: 5,
‘electric piano 2’: 6,
‘english horn’: 70,
‘fiddle’: 111,
‘flute’: 74,
‘french horn’: 61,
‘fretless bass’: 36,
‘fx 1 (rain)’: 97,
‘fx 2 (soundtrack)’: 98,
‘fx 3 (crystal)’: 99,
‘fx 4 (atmosphere)’: 100,
‘fx 5 (brightness)’: 101,
‘fx 6 (goblins)’: 102,
‘fx 7 (echoes)’: 103,
‘fx 8 (sci-fi)’: 104,
‘glockenspiel’: 10,
‘guitar fret noise’: 121,
‘guitar harmonics’: 32,
‘gunshot’: 128,
‘harmonica’: 23,
‘harpsichord’: 7,
‘helicopter’: 126,
‘honky-tonk piano’: 4,
‘kalimba’: 109,
‘koto’: 108,
‘lead 1 (square)’: 81,
‘lead 2 (sawtooth)’: 82,
‘lead 3 (calliope)’: 83,
‘lead 4 (chiff)’: 84,
‘lead 5 (charang)’: 85,
‘lead 6 (voice)’: 86,
‘lead 7 (fifths)’: 87,
‘lead 8 (bass + lead)’: 88,
‘marimba’: 13,
‘melodic tom’: 118,
‘music box’: 11,
‘muted trumpet’: 60,
‘oboe’: 69,
‘ocarina’: 80,
‘orchestra hit’: 56,
‘orchestral harp’: 47,
‘overdriven guitar’: 30,
‘pad 1 (new age)’: 89,
‘pad 2 (warm)’: 90,
‘pad 3 (polysynth)’: 91,
‘pad 4 (choir)’: 92,
‘pad 5 (bowed)’: 93,
‘pad 6 (metallic)’: 94,
‘pad 7 (halo)’: 95,
‘pad 8 (sweep)’: 96,
‘pan flute’: 76,
‘percussive organ’: 18,
‘piccolo’: 73,
‘pizzicato strings’: 46,
‘recorder’: 75,
‘reed organ’: 21,
‘reverse cymbal’: 120,
‘rock organ’: 19,
‘seashore’: 123,
‘shakuhachi’: 78,
‘shamisen’: 107,
‘shanai’: 112,
‘sitar’: 105,
‘slap bass 1’: 37,
‘slap bass 2’: 38,
‘soprano sax’: 65,
‘steel drums’: 115,
‘string ensemble 1’: 49,
‘string ensemble 2’: 50,
‘synth bass 1’: 39,
‘synth bass 2’: 40,
‘synth drum’: 119,
‘synth voice’: 55,
‘synthbrass 1’: 63,
‘synthbrass 2’: 64,
‘synthstrings 1’: 51,
‘synthstrings 2’: 52,
‘taiko drum’: 117,
‘tango accordion’: 24,
‘telephone ring’: 125,
‘tenor sax’: 67,
‘timpani’: 48,
‘tinkle bell’: 113,
‘tremolo strings’: 45,
‘trombone’: 58,
‘trumpet’: 57,
‘tuba’: 59,
‘tubular bells’: 15,
‘vibraphone’: 12,
‘viola’: 42,
‘violin’: 41,
‘voice oohs’: 54,
‘whistle’: 79,
‘woodblock’: 116,
‘xylophone’: 14
}
PERCUSSION = {
‘acoustic bass drum’: 35,
‘acoustic snare’: 38,
‘bass drum 1’: 36,
‘cabasa’: 69,
‘chinese cymbal’: 52,
‘claves’: 75,
‘closed hi hat’: 42,
‘cowbell’: 56,
‘crash cymbal 1’: 49,
‘crash cymbal 2’: 57,
‘electric snare’: 40,
‘hand clap’: 39,
‘hi bongo’: 60,
‘hi wood block’: 76,
‘hi-mid tom’: 48,
‘high agogo’: 67,
‘high floor tom’: 43,
‘high timbale’: 65,
‘high tom’: 50,
‘long guiro’: 74,
‘long whistle’: 72,
‘low agogo’: 68,
‘low bongo’: 61,
‘low conga’: 64,
‘low floor tom’: 41,
‘low timbale’: 66,
‘low tom’: 45,
‘low wood block’: 77,
‘low-mid tom’: 47,
‘maracas’: 70,
‘mute cuica’: 78,
‘mute hi conga’: 62,
‘mute triangle’: 80,
‘open cuica’: 79,
‘open hi conga’: 63,
‘open hi-hat’: 46,
‘open triangle’: 81,
‘pedal hi-hat’: 44,
‘ride bell’: 53,
‘ride cymbal 1’: 51,
‘ride cymbal 2’: 59,
‘short guiro’: 73,
‘short whistle’: 71,
‘side stick’: 37,
‘splash cymbal’: 55,
‘tambourine’: 54,
‘vibraslap’: 58
}
ADXL345={
‘2G’:[7,13]
}
BMP180=[50,500]
Canary App
This web application is a generalized control centre for the user where music settings such as volume, pitch, background music and instrument can be adjusted in addition to monitoring the patient in real-time movement data plot.
Authenticate
In order to use Canary, a user have to log in with user name and password credentials.
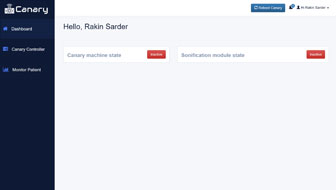
dashboard
It will take you to web application’s dashboard from which the user can check device status. The user can also reboot the device anytime using the ‘Reboot Canary’ button on the top right corner at any instant within the web application.
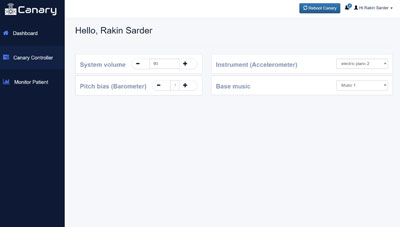
Control center
From the sidebar, the user can navigate to the ‘Canary Control Center’ where the device’s music settings can be adjusted. These settings include volume, pitch, instrumental device and background music control.
Motion monitor
A user can monitor the state of a patient by navigating to the ‘Monitor Patient’ sidebar. The patient’s movement state can be monitored by a real-time movement data plot in the ‘monitor patient section’.
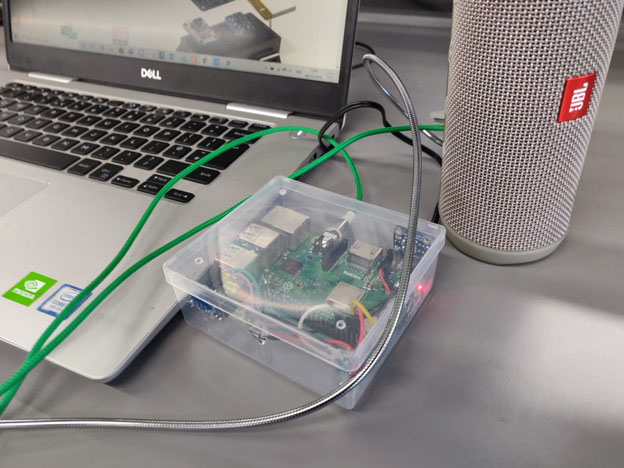
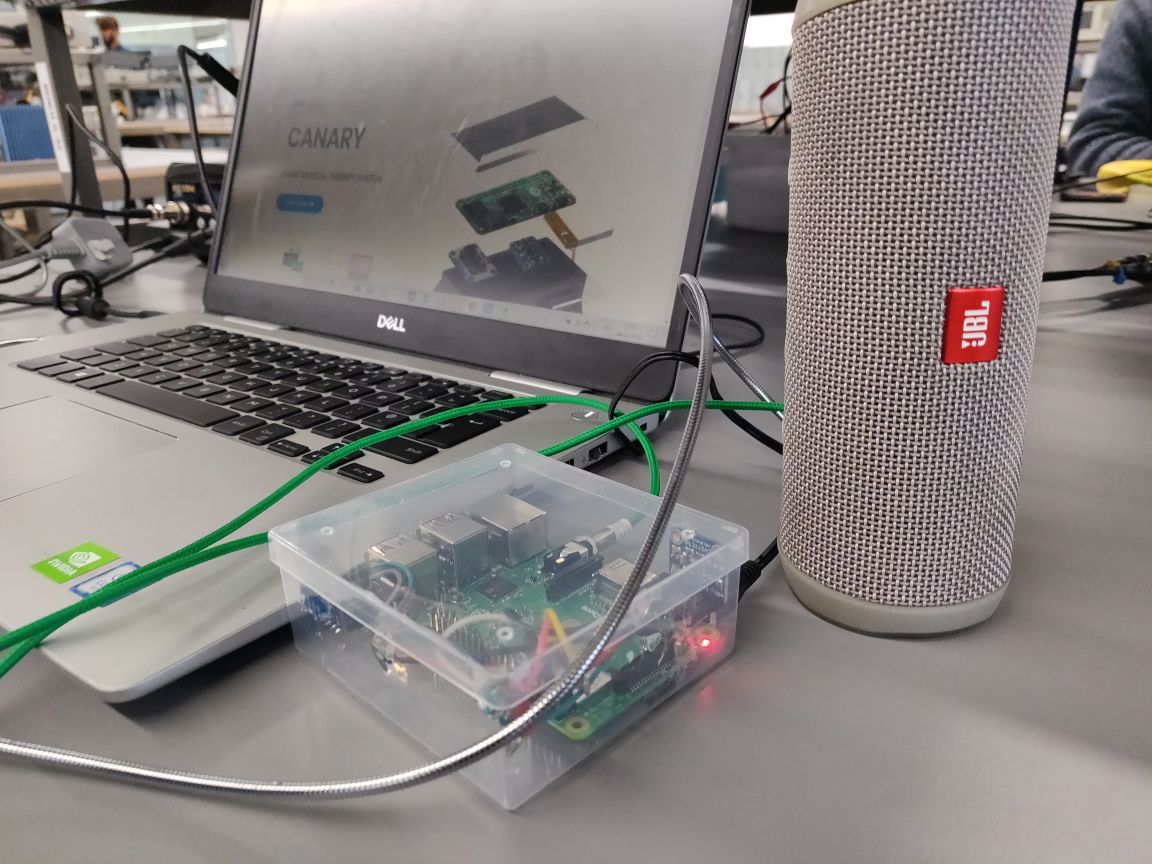
Project demonstration
Limitations
- Not packaged into a commercial device standard because of material constraint
- The project was initially planned to be carried out using Raspberry Pi Zero but due to time constraints the adoption of the project to Raspberry Pi Zero from Raspberry Pi 3 was not completed
- The device is not battery powered at this stage because the appropriate battery was not available
- There is a latency of 0.5s – 0.7s while playing the music notes
Future Plans
Make an enclosure for the device to make a consumer product

Make the device portable and rechargeable

Run user safety tests
